精密機械工学科
ロボット工房

次世代ロボット技術開発
学生プロジェクトの展開
ロボット工房は次世代ロボット技術開発に関する様々なプロジェクトを実施しています。ロボット工房設立以来、長期に渡り続いているプロジェクトは「宇宙エレベータープロジェクト」と「医療用マイクロロボット」があります。これらは将来の実用化が期待される分野であり、最先端の研究にチャレンジしているプロジェクトです。ロボット工房のプロジェクトは学生が起案し、計画を立てることで自主的に進めています。このことから、何かを新しく始めるための企画や計画書を書く経験をします。また、イメージしたものを設計し、部品を作り、制御して動かす経験をして、改めて座学で学んだことの理解が深まります。
宇宙エレベータープロジェクト
地球と宇宙をつなぐ次世代の完全宇宙往還機として期待されている宇宙エレベーター開発プロジェクト。運行体(クライマー)や宇宙での実証モデルとなるテザー衛星の設計製作、性能試験など行っています。過去2回の欧州宇宙エレベーターチャレンジ(ドイツ・ミュンヘン市)では総合優勝を成し遂げました。また、2018年9月には開発した超小型テザー衛星の低軌道投入に成功し、実証実験を継続しています。
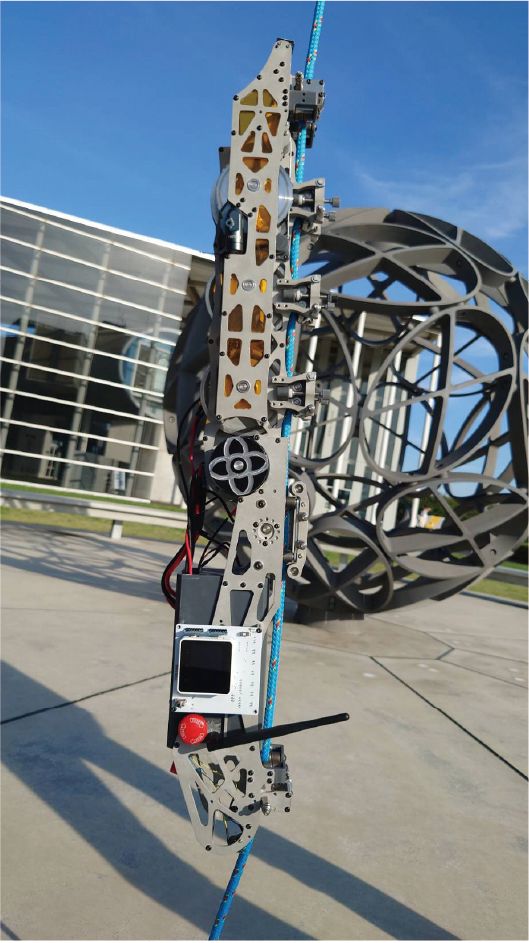
「世界最速の自立移動昇降ロボット」

「乗客や貨物を想定した制御の実現」
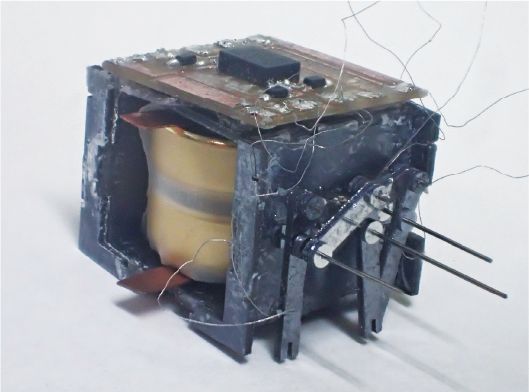
医療用マイクロロボットプロジェクト
1cm3以内に収まる小型なロボットを開発するプロジェクトです。小さな体をもつロボットは狭い場所や人の手の届かない場所、例えば将来的には体内での活躍も期待できます。ロボットの部品はクリーンルームと呼ばれる特殊な研究施設で作製します。ロボットは昆虫のような6脚歩行を行い、生物の脳の働きを模倣した人工ニューラルネットワークICで制御を行います。

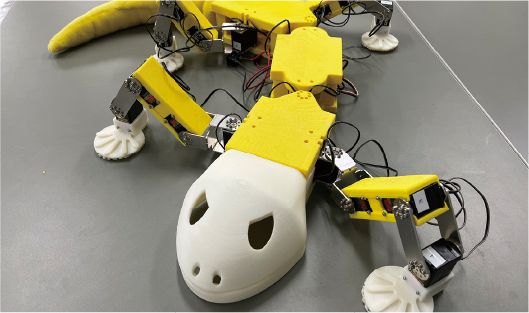
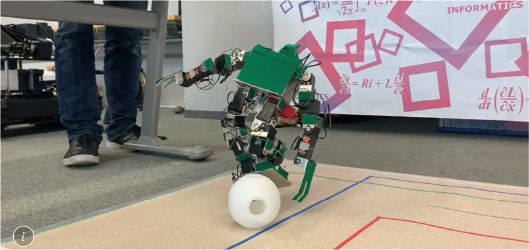
ヒューマノイド・アニマルロボットプロジェクト
人間のように2足で歩行するヒューマノイドロボットとセラピーなどで活躍が期待されるアニマルロボットを開発するプロジェクトです。ロボットはフレームの形状から学生が設計し、アルミ板の加工や3Dプリンターでの外骨格なども作製します。プログラムも作成することからロボットの形状ごとに動きに個性がでます。これらのロボットはイベントやロボットショーで大活躍です。

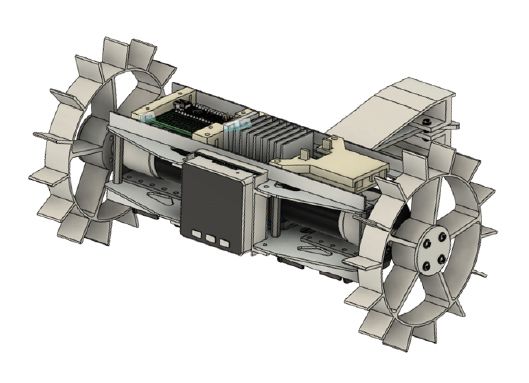
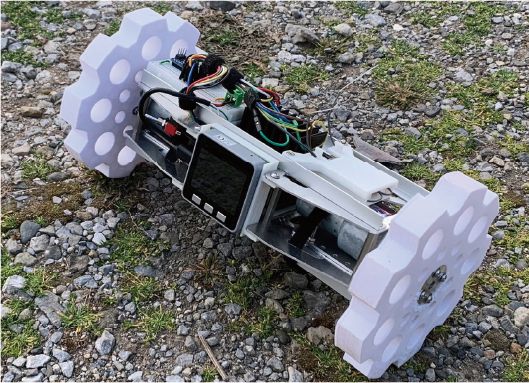
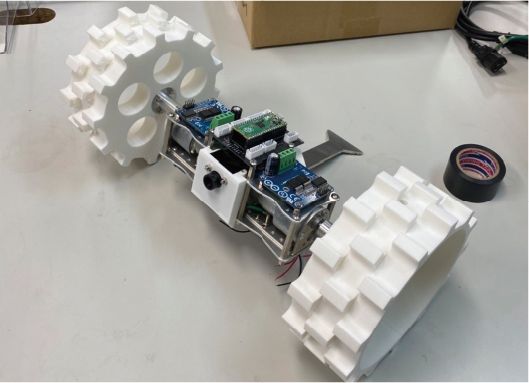
惑星探査ローバープロジェクト
宇宙開発における探査を補助する小型・軽量化されたローバーと呼ばれる走行機の作成を行うプロジェクトです。惑星探査を想定していることから急斜面や竪穴を走破できることが求められています。このプロジェクトでは地上実証試験機となる探査ローバーを開発します。また、開発したローバーは種子島ロケットコンテストCansat部門への出場を目的としています。

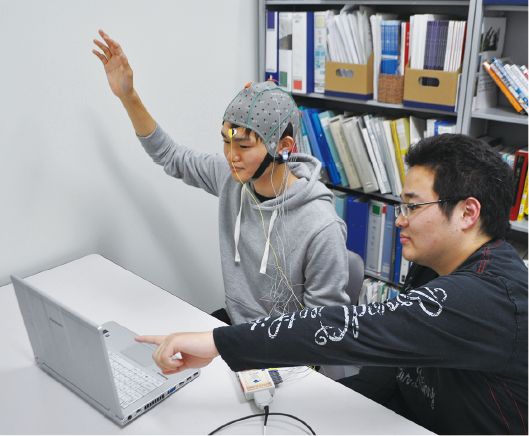
脳波制御ロボットプロジェクト
人間の脳波を特殊な機械で測定し、脳波でロボットを自由に動かすプロジェクトです。例えば体が不自由な患者さんは、トイレや飲食など看護師さんに介助をお願いしています。しかし、深夜など看護師さんに遠慮して、我慢する患者さんが多いのが現状です。体が不自由でも、脳波を読み取ることで患者さんが自由にロボットを動せる未来を実現するためにブレイン・マシン・インターフェース(BMI)の構築を目的としています。
画像認識AI開発プロジェクト
Raspberry piのシステムを利用した画像認識AIを開発するプロジェクトです。AIエッジデバイスであるRaspberry piにwebカメラを接続し動体検知を行います。将来的にロボットに搭載することでロボットの目の役割を担います。

これまで実施しているプロジェクト一覧
- ・宇宙エレベータープロジェクト
- ・医療用マイクロロボットプロジェクト
- ・ヒューマノイドロボットプロジェクト
- ・アニマルロボットプロジェクト
- ・惑星探査ローバープロジェクト
- ・画像認識AI開発プロジェクト
- ・脳波制御ロボットプロジェクト
- ・リアルロボットバトルプロジェクト
- ・FRPパーソナルEvカープロジェクト
- ・宇宙エレベータープロジェクト
- ・医療用マイクロロボットプロジェクト
- ・ヒューマノイドロボットプロジェクト
- ・アニマルロボットプロジェクト
- ・惑星探査ローバープロジェクト
- ・画像認識AI開発プロジェクト
- ・脳波制御ロボットプロジェクト
- ・リアルロボットバトルプロジェクト
- ・FRPパーソナルEvカープロジェクト
- ・宇宙エレベータープロジェクト
- ・医療用マイクロロボットプロジェクト
- ・ヒューマノイドロボットプロジェクト
- ・アニマルロボットプロジェクト
- ・惑星探査ローバープロジェクト
- ・画像認識AI開発プロジェクト
- ・脳波制御ロボットプロジェクト
- ・リアルロボットバトルプロジェクト
- ・FRPパーソナルEvカープロジェクト
その他多数